Jeoproje
Üye
- Katılım
- 16 Eyl 2012
- Mesajlar
- 21
- Puanları
- 1
- Yaş
- 63
Merhaba foto , resim veya çizim yok makina üzerinde monte edilmiş var foto alsak pek anlaşılmaz ancak detaylı olarak tarif edeyim.
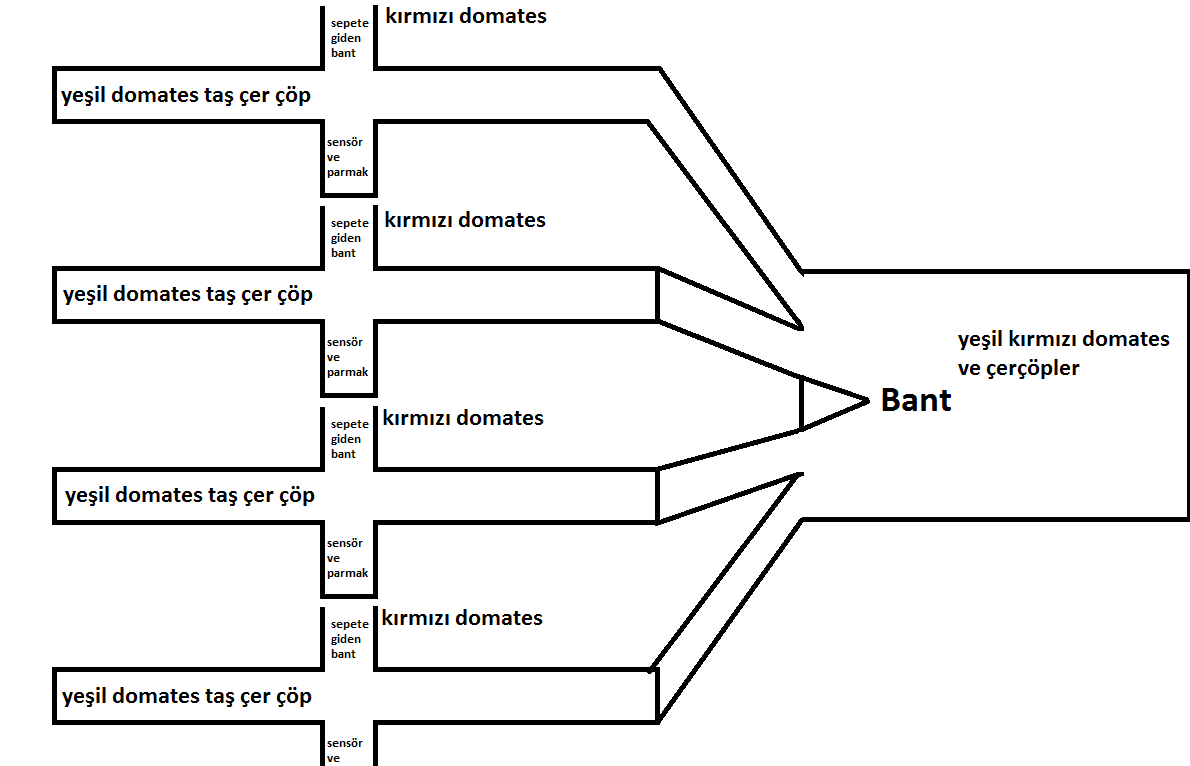
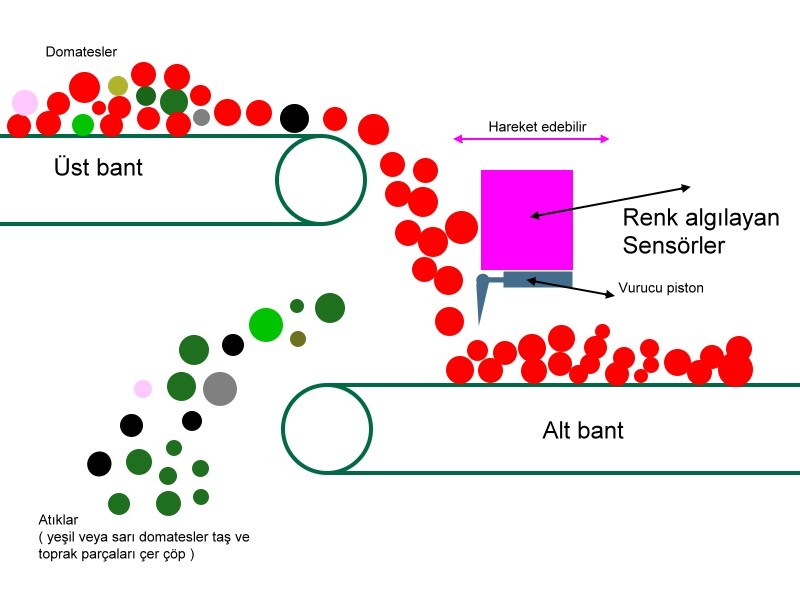
Öncelikle bu sistem ilk ayıklama ünitesi yani bundan önce domatesler ayıklanmıyor. Sadece domatesler dallarından vibrasyonla koparılıyor ve 1 metre genişliğinde tel bir banttan yanyana yığın halinde makina boyunca ilerliyor. Bu arada makina ön takımları ile tarladan sürekli domates toplamaya devam ediyor. İlk bantta tabiki kırmızı domatesler irili ufaklı yeşilli sarılı, toprak ve taş parçaları ile karmakarışık yığın halinde geliyor. Tek sıra ile gelmesi imkansız çünki makina saatte 30 ton domates topluyor. 1 metre genişliğindeki bant aniden son buluyor ve 40 cm aşşağıda farklı bir bant başlıyor.Üstteki bant ile altaki bant arasında 40 cm yükseklik 1 metre genişlikte bir boşluk var ve dışarıya açılıyor. Şimdi üstteki banttan yığın halinde aşşağıya düşmekte olan domatesler 1 metre uzunluğunda metal bir kasa içine konmuş sensörlerin önünden geçerken sensörlerin hemen altına monte edilmiş basınçlı hava ile çalışan ufak pistonların ucuna monte edilmiş alüminyum parmaklar geçmekte olan domateslerin arasında bulunan yeşil veya sarı domatesler ile domates olmayan nesnelere şiddetli ancak ufak bir darbe ile iki bant arasındaki boşluğa fırlatıyor. Yığın halindeki domatesler alt bant a dökülerek aynı esasta çalışan ikinci bir sensör sistemine doğru yol alıyor. sensörlerin bulunduğu metal kasa altında yaklaşık yanyana 60 küçük piston mevcut ve herbiri bir sensöre bağlı. Her sensör kendi hizasına gelen kırmızı olmayan her nesneye tekme atarak bant dışına fırlatıyor. Piston ucundaki vurucu parmaklar 10 mm genişliğinde alüminyum parçalar ve herbir piston bir sensöre bağlı. Yani sensörlerden gelecek renk algılama bilgisine göre bir mikro işlemci devresi o sensörün bağlı bulunduğu pistonu çalıştıracak röleyi tetikleyecek. Böylece sensör önünden geçen domatesleri çok süratli olarak kontrol edecek ve yeşil geçmekteyse vurup ayıracak. Vurucu parmaklar ile domateslerin dökülme mesafeleri operatör tarafından hidrolik olarak ayarlanıyor. Ayrıca eğer domatesler aşırı hızlı gelirse ilk bant yükselerek domateslerin geriye yuvarlanmaları sağlanarak sensör önünden daha yavaş veya istenilen süratte geçmesi sağlanıyor. Ayırım kalitesi iyi tabiki arada sırada yeşilin önüne geçen bir kırmızı domates de dışarı atılıyor veya kırmızının arkasına saklanan bir yeşil ayıklama bandına düşüyor . İşte bu nedenle ikinci bir ayıklama ünitesi isteniyor. makinadaki asıl ayırma ünitesi ikinci ayırma ünitesi. Bizim tornacılar bir yolla sisteme ilk ayırma ünitesi de ekleyerek randımanı italyanların yapabildiğinden çok daha fazla hale getirmişler. bir çizim ekledim basitce izah ediyor. sensörün hızlı geçen domatesler arasında kırmızıları bırakıp kırmızı olmayanlara tekme atıp bant dışına fırlatması gerekiyor.
Öncelikle bu sistem ilk ayıklama ünitesi yani bundan önce domatesler ayıklanmıyor. Sadece domatesler dallarından vibrasyonla koparılıyor ve 1 metre genişliğinde tel bir banttan yanyana yığın halinde makina boyunca ilerliyor. Bu arada makina ön takımları ile tarladan sürekli domates toplamaya devam ediyor. İlk bantta tabiki kırmızı domatesler irili ufaklı yeşilli sarılı, toprak ve taş parçaları ile karmakarışık yığın halinde geliyor. Tek sıra ile gelmesi imkansız çünki makina saatte 30 ton domates topluyor. 1 metre genişliğindeki bant aniden son buluyor ve 40 cm aşşağıda farklı bir bant başlıyor.Üstteki bant ile altaki bant arasında 40 cm yükseklik 1 metre genişlikte bir boşluk var ve dışarıya açılıyor. Şimdi üstteki banttan yığın halinde aşşağıya düşmekte olan domatesler 1 metre uzunluğunda metal bir kasa içine konmuş sensörlerin önünden geçerken sensörlerin hemen altına monte edilmiş basınçlı hava ile çalışan ufak pistonların ucuna monte edilmiş alüminyum parmaklar geçmekte olan domateslerin arasında bulunan yeşil veya sarı domatesler ile domates olmayan nesnelere şiddetli ancak ufak bir darbe ile iki bant arasındaki boşluğa fırlatıyor. Yığın halindeki domatesler alt bant a dökülerek aynı esasta çalışan ikinci bir sensör sistemine doğru yol alıyor. sensörlerin bulunduğu metal kasa altında yaklaşık yanyana 60 küçük piston mevcut ve herbiri bir sensöre bağlı. Her sensör kendi hizasına gelen kırmızı olmayan her nesneye tekme atarak bant dışına fırlatıyor. Piston ucundaki vurucu parmaklar 10 mm genişliğinde alüminyum parçalar ve herbir piston bir sensöre bağlı. Yani sensörlerden gelecek renk algılama bilgisine göre bir mikro işlemci devresi o sensörün bağlı bulunduğu pistonu çalıştıracak röleyi tetikleyecek. Böylece sensör önünden geçen domatesleri çok süratli olarak kontrol edecek ve yeşil geçmekteyse vurup ayıracak. Vurucu parmaklar ile domateslerin dökülme mesafeleri operatör tarafından hidrolik olarak ayarlanıyor. Ayrıca eğer domatesler aşırı hızlı gelirse ilk bant yükselerek domateslerin geriye yuvarlanmaları sağlanarak sensör önünden daha yavaş veya istenilen süratte geçmesi sağlanıyor. Ayırım kalitesi iyi tabiki arada sırada yeşilin önüne geçen bir kırmızı domates de dışarı atılıyor veya kırmızının arkasına saklanan bir yeşil ayıklama bandına düşüyor . İşte bu nedenle ikinci bir ayıklama ünitesi isteniyor. makinadaki asıl ayırma ünitesi ikinci ayırma ünitesi. Bizim tornacılar bir yolla sisteme ilk ayırma ünitesi de ekleyerek randımanı italyanların yapabildiğinden çok daha fazla hale getirmişler. bir çizim ekledim basitce izah ediyor. sensörün hızlı geçen domatesler arasında kırmızıları bırakıp kırmızı olmayanlara tekme atıp bant dışına fırlatması gerekiyor.
") kolay gelsin...
kolay gelsin...