
- Katılım
- 21 Ara 2006
- Mesajlar
- 2,545
- Puanları
- 419
Akşamları boş vakitleri değerlendirmek için bir tane arduino uno r3 aldım vakit buldukca projeleri gerçekleştirip buraya kodları ile birlikde vericem
öğrenmek istiyenler için şimdiden kolay gelsin
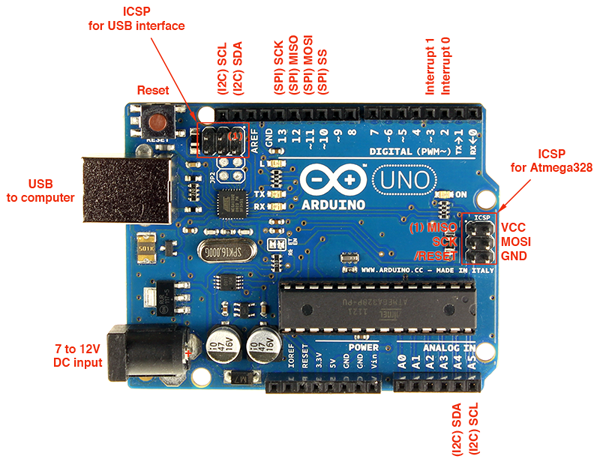
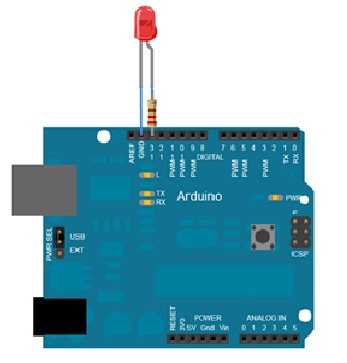
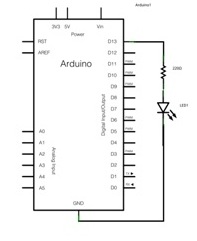
ilk proje arduinonun üzerindenki 13. pinde bulunan ledi yakıp söndürmek bu proje her yerde olduğu için alıntı yapıyorum.
ARDUİNO KOMUTLARI
pinMode(pin,mode) :
fonksiyon pinlerin girişmi yada cıkışmı
olmasına karar ve rir
Pin : kullanılacak pinin numarası (11, 10, 9,…)
Mode : Kullanıcak pin
input ya da output (INPUT, OUTPUT)
digitalWrite(pin,value) : bu fonksiyon pinin digital high ya da low
seviyesine çekilmesi için kullanılır yani pinin +5V’mu yoksa 0V’ mu olacağını
belirler.
Pin : kullanılacak pinin numarası (9, 8, 7,…)
Value : kullanıcak pinin değeri (HIGH, LOW)
delay(ms) : Programı
belirli Bir süre yazılan değer( boyunca milisaniye cinsinden) Duraklatır.
digitalRead(pin)
öğrenmek istiyenler için şimdiden kolay gelsin
ilk proje arduinonun üzerindenki 13. pinde bulunan ledi yakıp söndürmek bu proje her yerde olduğu için alıntı yapıyorum.
ARDUİNO KOMUTLARI
pinMode(pin,mode) :
fonksiyon pinlerin girişmi yada cıkışmı
olmasına karar ve rir
Pin : kullanılacak pinin numarası (11, 10, 9,…)
Mode : Kullanıcak pin
input ya da output (INPUT, OUTPUT)
digitalWrite(pin,value) : bu fonksiyon pinin digital high ya da low
seviyesine çekilmesi için kullanılır yani pinin +5V’mu yoksa 0V’ mu olacağını
belirler.
Pin : kullanılacak pinin numarası (9, 8, 7,…)
Value : kullanıcak pinin değeri (HIGH, LOW)
delay(ms) : Programı
belirli Bir süre yazılan değer( boyunca milisaniye cinsinden) Duraklatır.
digitalRead(pin)
Kod:
void setup() { //ayarlar yapılıp bir çıkış olarak dijital bir pin olarak başlatılamalı.
pinMode(13, OUTPUT); // arduıno 13 pin'ine led'in çıkısını tanımladık
}
void loop() { //bu komut verilen komutları bitinceye kadar tekrar bastan sona kadar yapar bu SONSUZ döngü gibi devam eder
digitalWrite(13, HIGH); // 13. pin'e logic 1 yani 5v çıkış gönderdik
delay(1000); // bekleme 1 sn
digitalWrite(13, LOW); // 13. pin'e logic 0 yani 0v çıkış gönderdi
delay(1000); //bekleme 1 sn