Verilen bilgilere ek olarak oransal, integral ve türevsel kontrolörün sistemi nasıl etkilediğini
anlatmaya çalışacağım.
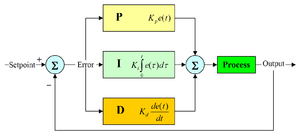
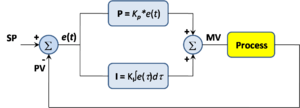
(hata=çıkışın olması istenen referans değeri - mevcut çıkış değeri, olduğu hatırlansın)
Oransal kontrolörün kontrol işareti üretebilmesi için mutlaka hata işaretine ihtiyaç vardır.
u=hata*p. Buradaki u kontrol işareti, hata ve p oransal katsayısı çarpılarak elde edilir.
Eğer hata yoksa oransal kontrolör çıkış üretemez. İşte bu sebeple de sürekli hal hatalarını oransal kontrolör ile tam olarak yokedemeyiz.(integral kontrolör ile sürekli halde de hataları yokederiz, ileride bahsedeceğim)
Diyelim ki bir aracı belirli bir çizgiyi takip etmesi için kontrol etmek istiyoruz. Burada referans değerimiz aracın takip edeceği çizgi olsun. Bu çizginin konum bilgisi ölçülüp aracın mevcut konumu ile karşılaştırılsın ve hata işareti elde edilsin. Kontrol işaretimizi de direksiyonu hareket ettiren bir motora uygulanan gerilim olarak düşünelim. [normalde kontrol işareti kuvvenlendirilerek, sisteme uygulanır. Yani kontrol algoritması(p, pi, pd,pid) bir işlemcide(mikroişlemci, dsp, plc, pc ya analog işlemci opamp vs.) üretildikten sonra elde edilen kontrol işareti güç katında(güç elektroniği devresi) kuvvetlendirildikten sonra sisteme uygulanır. ]
Eğer aracımız herhangi bir nedenle çizgi dışına çıkarsa(mesela çizgi sağa kıvrılsın ya da araca yandan rüzgar essin vs.) burada hata işareti oluşacak böylece kontrolör direksiyonu döndürecek kontrol işaretini üreterek aracın çizgiye oturmasını sağlayacaktır. Asıl mesele şudur, araç çizgiden 10 derece saptığında direksiyon 60 derece mi dönmeli ya da 20 derece mi dönmelidir. İşte bu etki oransal katsayı ile sağlanır. Oransal katsayı hatayı kuvvetlendirdiği için sistemin mevcut çıkışı ile o anki durumu karşılaştırarak sisteme verilecek enerjiye karar verir. Araç çizgi dışına çıktığı anda kontrolör aracı çizgiye oturtmak üzere direksiyonu döndüren motoru hareket ettirmek isteyecektir. Kontrolörün ilk anda direksiyonu 20 derece çevirdiğini farz edelim, daha sonra araç çizgiye biraz yaklaşacaktır, dolayısı ile de hata işareti azalacağından kontrol işareti oransal katsayı p ile orantılı olarak azalacak ve direksiyon yavaş yavaş 19 18... derece şeklinde döndürülerek ederek aracın çizgiye oturması sağlanacaktır. Oransal kontrolün etkisi hızlıdır. Ve sisteme verilecek enerjinin büyüklüğü ve hassasiyeti p, katsayısı ile belirlenir.
İşte kontrol aslında insan beyninin doğal yaptığı şeyi otomatik olarak yaptırmaya çalışmaktır.
Bir de bu işlemin 100 km/sa ile giden bir araçta on - off kontrol ile yapıldığını düşünelim. Araç çizgi dışına çıkınca direksiyonu tam sağa ya da tam sola kırsın, herhalde araba takla atar.
Oransal kontrolör hata büyük iken hızlı cevap verir ve hatayı giderir ancak hata azaldığından kontrol işareti de küçüleceğinden burada oransal etki azalacaktır.
Türevsel etkiye gelince, türev deyince akla gelmesi gereken şey değişimdir. Yani türevsel kontrolör hatanın değişimine bakar. Eğer hata değişimi varsa çıkış üretir, hata değişimi yoksa çıkış üretmez. Bir sabitin türevinin "0" olması ya da f(x)=2*x fonksiyonunun türevinin 2 olması bu fonksiyonların değişimini ifade etmektedir. Mesela f(t)=5 fonksiyonunu ele alalım. Burada t=0-sonsuz arasında değer almasına rağmen çıkış hep 5tir. Dolayısı ile değişim yoktur. f(x)=2*x fonksiyonunda ise her x değeri için çıkış 2 kat değerindedir. x 'e göre türev 2dir, fonksiyon girişin 2 katı şeklinde değişmektedir. Hani lisede fonksiyonların türev alma kurallarını öğretip de mantığını öğretmedikleri, ne işe yarar denilen türevin mantığını bilmek, türevsel etkiyi anlamak için gereklidir.
Araba örneğine geri dönersek, referans çizgi aniden sola doğru kıvrılsın. Araç çizgiden çıktığı anda burada hata işaretinde bir değişim olacaktır. Burada hata eğrisini gözönüne alırsanız bu eğrinin eğimi(yani türevi), türevsel katsayı ile çarpılıp motoru döndürecektir.
Türevsel katsayı hata değişimi büyükse sisteme verilen enerjiyi arttıracak, hata değişimi azaldıkça enerjiyi azaltacak, hata değişimi yoksa enerji vermeyecektir. Mesela PD (d:derivative türevsel, p

roportional oransal) kontrolde hem oransal hem de türevsel kontrolörün çıkışları toplanarak kontrol işareti elde edilir. D tek başına kullanılmaz.
İntegral kontrolör ise hatanın alanını hesaplar. Yani toplaya toplaya giderek, hata işareti olmasa bile kontrol işaretini üretebilir. Böylece sürekli hal hatalarını da yok eder. Ancak kontrolörü yavaşlatır ve zamanla şiştiği için kararsızlığı arttırabilir.
Aslında mantığı tam olarak anlamak için kontrol teorisindeki matematiksel ifadelere yorum getirmek ve biraz düşünmek lazım. Umarım bu bilgiler kafanızda bir kapı aralamaya yardımcı olur.

")