
lynxrz
Üye
- Katılım
- 10 Eyl 2011
- Mesajlar
- 6
- Puanları
- 1
İyi günler
Bir AC motoru devre yardımıyla servolaştırmaya çalışıyorum fakat bir yerde bilgim yetmediği için sıkıntıya düştüm ve sizlerden yardım istiyorum
Öncelikle sistemi ve ne yapmaya çalıştığımı tarif edeyim
Vakumlu güneş kollektörünün yönlendirilmesinde bir AC motor kullanılmakta ve bu AC motor ile güneş açısına göre pozisyon kontrolü zorlaşmaktadır.
AMAÇ: 9g servo motor ile AC motorun pozisyon kontrolünü sağlayıp, bu değerlere göre güneşin pozisyonuna göre” LDR > Arduino > Servo > Ara devre > AC motor kontrolcüsü > AC motor > Güneş kollektörü pozisyonu değiştimesi > servo pozisyon tespiti” şeklinde ilerleyip güneş açısına göre pozisyon alacaktır.
Servolaştırma işleminde servo motorun pozisyon tespiti kullanılacaktır ve kendi motoru AC motor kontrolcüsünde anahtarlama için kullanılacaktır.



Servo motor 'un
Voltaj değeri : 4.12 V
Birim pozisyon değiştirme için servo motor üzerinden geçen akım: 0.006 - 0.030 A
Servo motorun max arduino'dan alabildiği sınır değer 0.6 A
Not: servo motorun herhangi bir yüke tabii tutulmadan değerler alınmıştır ve istenilen pozisyon değerine
ulaşılmadığında akım değerinin arttığı tespit edilmiştir.
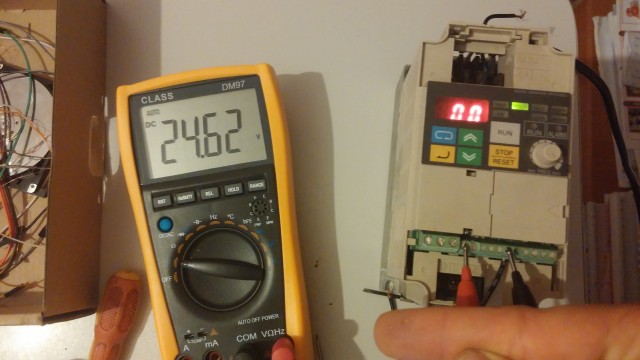
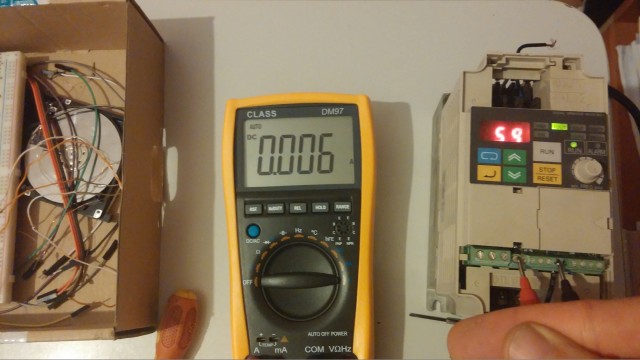
Fotoğraflarda görüldüğü gibi AC motor kontrolcüsünü anaharı bir güç kaynağı gibi düşünecek olursak
24.62 V ve 0.006 A değerlerine sahiptir.

Fotoğrafta görülen S1- SC ile S2 - SC bağlantıları AC motoru saat yönende ve saat yönünün tersinde
dönmesini sağlamaktadır.
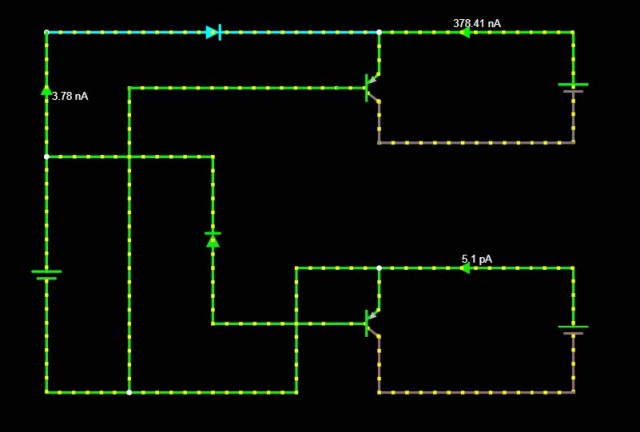
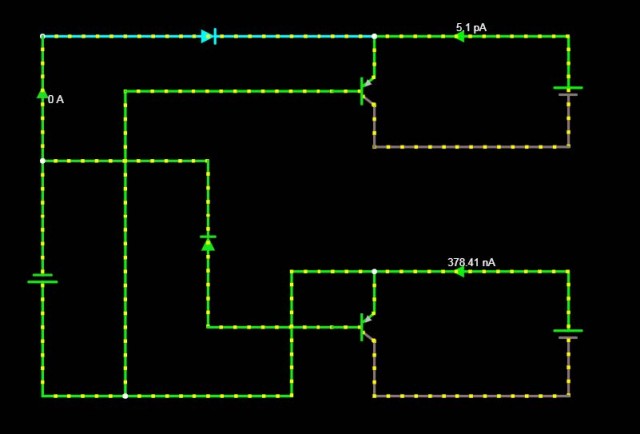
Ara devrenin kullanılmasındaki amaç servo motorun iptal edilen motorundan çıkan akımın (sol taraf), AC motor
kontrolcüsünün S1- SC ve S2 - SC (sağ taraf) arasındaki akımı geçirmesini sağlamasıdır.
Ara devre iptal edilen servo motorun verdiği akım yönüne kontolcünün saat yönü veya tersine dönmesini
sağlamaktadır.
Benim sıkıntım şu; Elektronik konusunda çok bilgi sahibi değilim yeni yeni öğreniyorum
Kurduğum ara devre teoride çalışıyor fakat 0.006 A ve 24.62 V değerlerini hangi transistör karşılar bilmiyorum akım çok zayıf zira, ya da hangi diyotu kullanmalıyım bunlar hakkında bilgim yok
Kime sorduysam "internette onların dökümanları var" dedi fakat dediğim gibi acemisi olduğum için bir şey anlamadım
Bana bu konuda yardımcı olabilir misiniz?
Bir AC motoru devre yardımıyla servolaştırmaya çalışıyorum fakat bir yerde bilgim yetmediği için sıkıntıya düştüm ve sizlerden yardım istiyorum
Öncelikle sistemi ve ne yapmaya çalıştığımı tarif edeyim
Vakumlu güneş kollektörünün yönlendirilmesinde bir AC motor kullanılmakta ve bu AC motor ile güneş açısına göre pozisyon kontrolü zorlaşmaktadır.
AMAÇ: 9g servo motor ile AC motorun pozisyon kontrolünü sağlayıp, bu değerlere göre güneşin pozisyonuna göre” LDR > Arduino > Servo > Ara devre > AC motor kontrolcüsü > AC motor > Güneş kollektörü pozisyonu değiştimesi > servo pozisyon tespiti” şeklinde ilerleyip güneş açısına göre pozisyon alacaktır.
Servolaştırma işleminde servo motorun pozisyon tespiti kullanılacaktır ve kendi motoru AC motor kontrolcüsünde anahtarlama için kullanılacaktır.
Servo Motor
Sol - Pozisyon tespiti | Sağ - İptal edilecek dc motor
Servo motor 'un
Voltaj değeri : 4.12 V
Birim pozisyon değiştirme için servo motor üzerinden geçen akım: 0.006 - 0.030 A
Servo motorun max arduino'dan alabildiği sınır değer 0.6 A
Not: servo motorun herhangi bir yüke tabii tutulmadan değerler alınmıştır ve istenilen pozisyon değerine
ulaşılmadığında akım değerinin arttığı tespit edilmiştir.
AC Motor Kontrolcüsü
Fotoğraflarda görüldüğü gibi AC motor kontrolcüsünü anaharı bir güç kaynağı gibi düşünecek olursak
24.62 V ve 0.006 A değerlerine sahiptir.
Fotoğrafta görülen S1- SC ile S2 - SC bağlantıları AC motoru saat yönende ve saat yönünün tersinde
dönmesini sağlamaktadır.
Ara Devre
Ara devrenin kullanılmasındaki amaç servo motorun iptal edilen motorundan çıkan akımın (sol taraf), AC motor
kontrolcüsünün S1- SC ve S2 - SC (sağ taraf) arasındaki akımı geçirmesini sağlamasıdır.
Ara devre iptal edilen servo motorun verdiği akım yönüne kontolcünün saat yönü veya tersine dönmesini
sağlamaktadır.
Benim sıkıntım şu; Elektronik konusunda çok bilgi sahibi değilim yeni yeni öğreniyorum
Kurduğum ara devre teoride çalışıyor fakat 0.006 A ve 24.62 V değerlerini hangi transistör karşılar bilmiyorum akım çok zayıf zira, ya da hangi diyotu kullanmalıyım bunlar hakkında bilgim yok
Kime sorduysam "internette onların dökümanları var" dedi fakat dediğim gibi acemisi olduğum için bir şey anlamadım
Bana bu konuda yardımcı olabilir misiniz?