Sürücün nasıl bir şey bilmiyorum.
Verdiğin koda göre pek uyuşmuyor ya da ben anlamıyorum.
Özet olarak mach3 gibi programlar paralel porttan hız için step yön için direction komutları yollar , her eksen için.
Arabirimler bunları uygun seviyelere getirir ve çıkışları ilgili sürücüye bağlanır.
Bu tip temel bilgiler için forumdaki başlıkları oku , görünüşe göre hiç temel bilgi yok.
Sürücünün verilerini incele kablo diyagramlarına bak , harici girişleri varsa ( encoder/resolver girişleri ile karıştırma ) ona göre bağlarsın.
Ayrıca değişik kontrol girişleri için program seçenekleri olabilir onları da ayarlarsın.
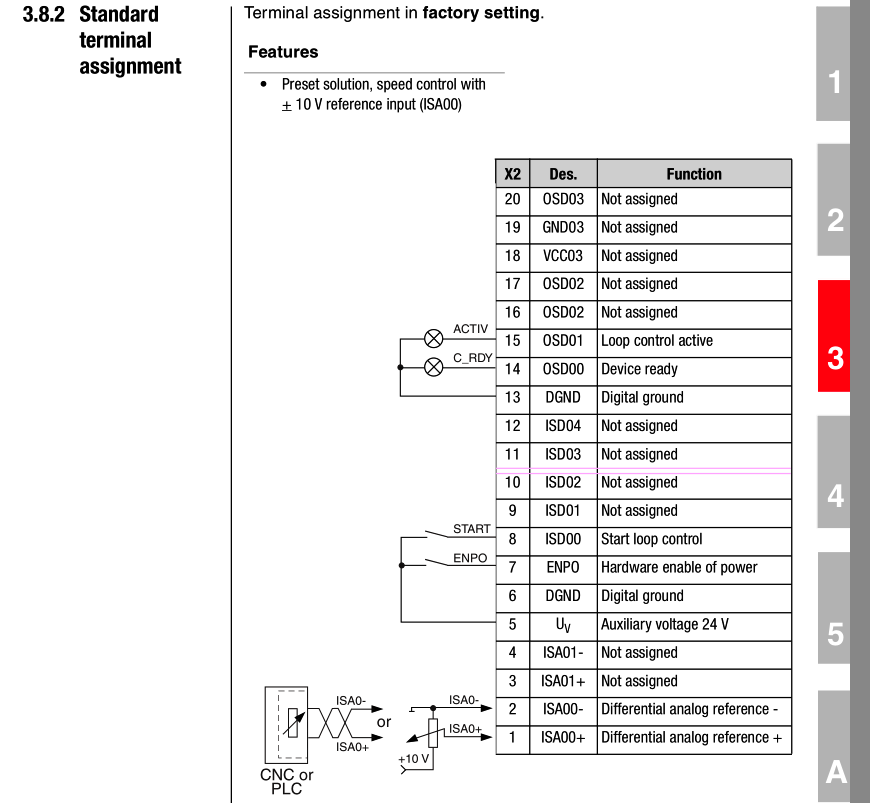
Mesela şöyle gözüküyor :
Bu tip konularda bilmeyenlere yardım sakıncalı oluyor .
Mala ve cana zarar gelmesini istemeyiz.
Bilmeyen doğru dürüst anlatamıyor bile ve oradan hareketle çıkılacak yol yanlış olabiliyor .
Bu sebeple ben fazla yazmıyorum.

 İnverter kaynak makinesi çalışıyor fakat yetersiz akım çıkarıyor
İnverter kaynak makinesi çalışıyor fakat yetersiz akım çıkarıyor Akım korumalı priz kullanmaya başladıktan sonra kaçak akım rolesi atıyor.
Akım korumalı priz kullanmaya başladıktan sonra kaçak akım rolesi atıyor.
