Dc motorlar daha çok endüstride kullanılırlar. Motorun dairesel hızı uygulanan voltajla doğru orantılıdır. Çıkış momenti ise bobin akım gücü ile doğru orantılıdır. Eğer haraket hassas bir şekilde kontrol edilmek isteniyorsa geri besleme kullanılmalıdır. Genel dc servomotorlar üzerlerinde yer ve hız algılayıcıları bulundururlar. Büyük motorlarda bobili statorlar bulunurken, küçük olanlarında sabit mıknatıs statorler bulunur. Samarium kobalt mıknatıslarının kullanılmasıyla yüksek güç/ağırlık oranlarına ulaşılır. Bu motorlarda çoklu bobinli bir rotor bulunur ve bu bobinker komütatör sayesinde güç kaynağına baplanırlar. Komütatör etrafında bakır teller olan bir silindirdir. Karbon fırçalar bir zamanda bir bobine
Elektrik vermesi için güç kaynağını komütatöre bağlarlar. Rotorun ürettiği manyetik alan statorün ürettiği manyetik alanla çakışır ve bunun sonucunda oluşan moment rotoru döndürür. Rotor dönerken komütatör de döner ve bu da karbon fırçaların başka bir bobini beslemesine neden olur. Bu sayede sürekli dönme hareketi sağlanmış olur.
DC Motorlar yaklaşık 100 yıldır hayatımızda yer alıyor.Dc Motorlar dc akım gücünden faydalanmak için üretilen ilk elektrik motorlarıdır.
Fakat bugün ve gelecekte dc motorların endüstride ki yeri ne olacak?
Bu soruyu cevaplamak için dc motorların bazı temel özelliklerine bakmamız gerekir.
1.Geniş bir çalışma hızı aralığına sahiptirler.
2.Hız regülasyonları iyidir.
3.Ebatları ve ağırlıkları avantaj sağlar.
4.Kolay kontrol edilebilirler.
Şimdi bir dc sürücünün yukarda yazmış olduğumuz özelliklere dc motorlara nasıl kazandırdığını inceleyelim.
Bir dc motora dc sürücü ile yol verme işlemi iki temel kısımdan oluşur.Bunlardan birincisi motor ikincisi ise motorun kontrolüdür.Bu motorun kontrol kısmına regülatör de denir.
DC sürücülerin dc motorları nasıl kontrol ettiğini daha iyi anlayabilmek için dc motorlara ait çok temel iki özelliğin iyi anlaşılması gerekir.
Bunlardan birincisi dc motorlarda ki akım-tork ilişkisi, diğeri de dc motorlarda ki voltaj-hız ilişkisidir.
1.DC Motorlarda Akım-Tork İlişkisi
Dc motorlarda armatür akımı ile çıkış torku motorun hızı ne olursa olsun birbirleri ile direk ve doğru orantılıdır.Yani Yük(tork) arttıkça, aynı oranda armatür akımı da artar.Yük(tork) azaldıkça, armatür akımı da aynı oranda azalır.
2.DC Motorlarda Voltaj-Hız İlişkisi
Dc motorlarda çıkış yükü sıfırken, armatür voltajı ile motor hızı direk ve doğrusal olarak orantılıdır.Yani hız da ne kadar artma ya da azalma olursa, armatür voltajında da aynı oranda artma ya da azalma olur.Sistem yüklü iken bu ideal doğrusal oranda yükün miktarına göre bir miktar sapma olur fakat yine de hızın artışı ya da azalması yüksüz halde olduğu gibi armatür voltajının artmasına ya da azalmasına sebep olur.
Bu iki temel özelliği anlamak, bir dc sürücünün temel çalışma prensibinin anlaşılması açısından çok önemlidir.
DC Sürücülerin Çalışması
Dc sürücüler içlerinde temel olarak iki işlem gerçekleştirirler.Bunlardan birincisi sürücüye gelen ac akımı, dc motorun çalıştırılması için gerekli olan dc akıma çevirmek ikincisi ise hız ya da tork kontrolü ile motora yol vermektir.
1.AC Akımın DC Akıma Çevrilmesi
Dc sürücülerin içerisinde tristör (SCR=silicon controlled rectifiers) dediğimiz özel transistor ler bulunmaktadır.Özet olarak bu tristörler kendilerine gelen üç faz alektrik akımını gate’lerine gelen pulse’ler ile dc akıma çevirirler.BU sistem tipik bir güç köprüsü sistemidir.
2.DC Sürücülerin DC Motorları Kontrolü
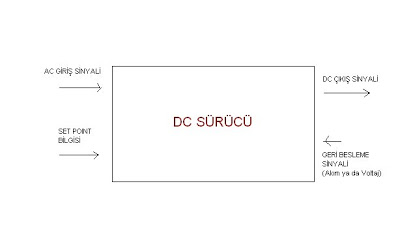
Şekilden de görebileceğiniz gibi, bir dc sürücünün temel 2 giriş sinyali ve 1 çıkış sinyali vardır.AC giriş sinyalinin tristörler ile dc çıkış sinyaline çevrildiğini önce ki bölümde anlatmıştık.
Şimdi dc sürücünün çıkıştan aldığı geribesleme sinyalleri ile motoru nasıl kontrol ettiğini inceleyelim.
DC sürücüler, çıkıştan aldıkları geribesleme sinyalinin türüne göre 3 farklı şekilde hız kontrolü yaparlar.
1.Voltaj Geribeslemesi İle Hız Kontrolü:
DC sürücünün çıkışından alınan armatür voltajı, tekrar geribesleme yolu ile girişe verilir.Girişte ki set point potansiyometresi ile ayarlanan başlangıç armatür voltajı ile kıyaslanır.Eğer motorun hızı artarsa armatür voltajıda artacağından,geribeslenen armatür voltajı set point potansiyometresi ile ayarlanan başlangıç armatür voltajından büyük çıkar ve sürücü armatür voltajında artan hız miktarını istenen değere çekecek kadar bir azaltma yapar.
Hızın düşmesi durumunda da armatür voltajını hızı istenen değerde tutatcak kadar arttırır.
Bu şekilde hız kontrolüne “Voltaj Kontrolü” denir.
2.Akım Geribeslemesi İle Hız Kontrolü:
DC sürücünün çıkışındaki akım bilgisi sisteme geribesleme yolu ile bildirilir.Eğer yükte(tork) bir artış meydana gelirse,motorun hızı doğal olarak düşer. Bu torktaki artş aynı oranda akımda da oluşacağından girişe verilen geribesleme akımındaki artış bilgisini değerlendiren sürücü,armatür voltajını gerektiği kadar arttırarak hızı sabit tutmaya çalışır.
Bu şekilde hız kontrolüne “Akım Kontrolü” denir.
3.Takometre Geribeslemesi ile Hız Kontrolü:
Motora takılan bir analog takometre yada dijital enkoder motorun hız bilgisini sürücüye iletirler.Sürücü aldığı hız bilgisini yorumlayarak armatür voltajını arttırır ya da azaltır.Bu tip motor kontrolü diğer iki yönteme göre daha hassas ve başarılı sonuçlar verir.
DC Sürücü Çeşitleri:
Temel olarak dc sürücüler iki kategori altında incelenebilirler.
1.Rejeneratif DC Sürücüler
Bu tip sürücülerde motorun hızı ile torkun hızının yönü bağımsız olarak kontrol edilebilirler.Yani hızın yönü ile torkun yönünün aynı olması zorunluluğu yoktur.
Bu tip sürücülere 4Q (4 quadrant) sürücüler denir.
2.Rejeneratif Olmayan DC Sürücüler
Bu sürücülerde hız ve torkun yönü bağımsız olarak kontrol edilemez.Yani hızın ve torkun yönü daima aynıdır.Bu tip sürücülere 1Q(1 quadrant) sürücüler denir.

 Arçelik 9 kilo 9103 Çamaşır Makinesi ekran gidip geri geliyor çalışmıyor
Arçelik 9 kilo 9103 Çamaşır Makinesi ekran gidip geri geliyor çalışmıyor


 Casper laptop wifi açılmama sorunu
Casper laptop wifi açılmama sorunu